1. 정의
- 좌표(Coordinate)를 표현하기 위한 체계(System)
- 좌표(Coordinate): 원점에서 얼마나 떨어져 있는지를 나타내는 값(=Scalar, 스칼라)
2. 좌표계의 요소
1) 축(Axis)
- 정의: 좌표를 정의할 때 기준이 되는 양방향의 무한한 선
- 축의 종류
(1) X축(종축, 빨간색): 물체가 앞 / 뒤로 이동하는 방향
(2) Y축(횡축, 초록색): 물체가 오른쪽 / 왼쪽으로 이동하는 방향
(3) Z축(수직축, 파란색): 물체가 위 / 아래로 이동하는 방향
- 역할: 객체의 위치 이동, 회전, 스케일 조정 등의 변환 작업을 수행할 때 기준이 됨
2) 원점(Origin)
- 축의 중점: (0, 0, 0) 좌표로 표현되는 모든 좌표의 기준점
- 원점을 중심으로 +, - 구분: 항상 +가 오른쪽인 것은 아니기에 미리 방향정의를 해 명확히 하는 것이 좋음
3) 차원(Demension)
- 공간의 크기, 구조 설명: 축의 개수에 따라 1차원, 2차원, 3차원으로 나뉨
- 서로 다른 2개의 좌표 사이에 무한한 촤표가 있음
- 각 축은 서로 수직관계임
3. 3차원 좌표계
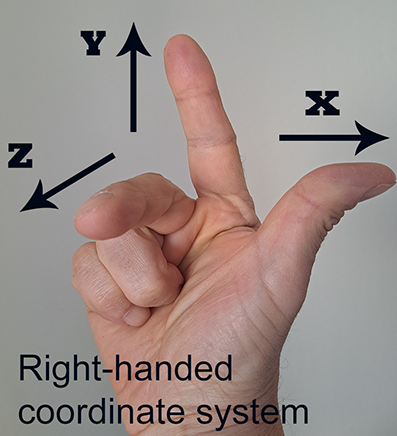
1) 오른손 좌표계
- 오른손의 엄지, 검지, 중지를 이용해 축의 방향 정의
(1) 축의 방향
2) 왼손 좌표계
- 왼손의 엄지, 검지, 중지를 이용해 축의 방향 정의
- 언리얼 엔진에서 사용하고 있는 좌표계
(1) 축의 방향

* 3차원 좌표계의 문제점
- 직교 좌표계를 설명하는 데카르트 좌표계를 기반으로 만들어졌지만 Z축 방향을 고정하지 않음
→ 각 축의 + 방향망 정의한다면 좌표계간 호환도 가능하기 때문에 여러 좌표계가 나올 수 있음
3) World Space(월드 스페이스)
(1) 정의
- 전체 씬이나 환경의 글로벌 기준 좌표계: 모든 객체의 절대적인 위치 정의
- 모든 객체는 월드스페이스에 존재
(2) Transform
- 정의: World내 오브젝트의 T(Translation, 위치), R(Rotation, 회전), S(Scale, 크기)
- TRS 모두 3차원 벡터로 표현
: T(Translation, 위치) - 월드 스페이스 내의 위치 표현(X, Y, Z 원소 모두 double형)
: R(Rotation, 회전) - 객체의 방향 정의(X, Y, Z 원소 모두 double형)
: S(Scale, 크기) - 객체의 크기 정의(X, Y, Z 원소 모두 float형)
- 연산은 행렬식 사용: Local(S/R/T) → World → View → Projection
4) Local Space(로컬 스페이스)
- 객체가 움직인 방향에 따라 위치가 변하는 상대(Relationship) 좌표
'Unreal Engine🎮 > 블루프린트 - 이론' 카테고리의 다른 글
| 사용자에게 입력 데이터 받아오기 (6) | 2024.10.09 |
|---|---|
| Pawn(폰) (0) | 2024.10.09 |
| FPS와 Delta Time (2) | 2024.09.29 |
| 기하학(Geometry) (5) | 2024.09.25 |
| Actor(액터) (0) | 2024.09.25 |